Important Dates
January 19: Permission Slip Due
February 2: Flier Due
February 9: Science Fair Day
February 2: Flier Due
February 9: Science Fair Day
- 7:50-8:10 Participants will set up their projects in the church basement.
- 8:30-1:00 Classes will view the projects.
- 1:00- 4:00 Judges will view the projects and interview the participants.
- 4:00- 4:30 Family and friends may enter the science fair.
- 4:30 Winners will be announced.
What is a science fair?What is a science fair?
A science fair is an opportunity for students to be real scientists! Scientists try to solve problems and answer questions by doing experiments (running tests) and sharing their results with others. Sometimes they share their experiments and results with others at big conventions that look like giant science fairs! Science fairs are not about showing how much you already know or about getting the “right” answer. To enter a science fair you must think of a question you want to know the answer to, design an experiment to find that answer, and then do the experiment and find an answer. What happens at a science fair? What do I need to do? Long before the fair, the Science Fair Committee needs to know what you plan to do so they can make sure it’s okay for the science fair. You must submit a flier (example on the right) that tells readers what your experiment is about. After the Science Fair Committee approves your idea, your flier will hang on the walls at school. This should make students and teachers excited to see your project. Work on your experiment at home with an adult. You may need an adult to help you with supplies, sharp tools, electricity, heat, chemicals, the computer, etc. An adult can help you with whatever you need, but remember that you are the one that must answer the judges’ questions during the science fair. Be sure to take pictures during your experiment to use on your display later. After you have completed the experiment, create a display that describes everything you did and what results you got. Use the Display Diagram (attached) to help you. On the day of the science fair, an adult will show you where to set up your display. When it’s time for judging, you will stand near your display. The judges will stop at your display. You must tell them about your experiment and results. They will listen to you, read your display, and ask you questions about your experiment. After everyone has been judged, the science fair will be open to students, parents, and teachers. Others will come around to see your display. You may want to visit other displays in the room. At the end, the Science Fair Committee will announce the winners and give out the prizes. Then you may take your display home. Parents (especially Pre-K through 3rd grade) A science fair project is something you and your child can do together. The younger students will probably need a lot of help. We don’t expect any of the students to complete their projects entirely on their own. Please make sure there is always an adult available to help when your child is working on their project. Remember that the students will be alone with their project during judging. The students must be able to present their findings without help from an adult. |
Example of a flier
|
Science Fair Rules
- Only one student per entry. You cannot work with a partner or group.
- Adults can help. It would be best to have an adult with you to help with supervising, getting materials, building, etc. The only part an adult can’t help you with is the judging.
- You cannot do your experiment at the science fair. You must do it at home, find the results, and describe your process and findings on your display.
- Your display must be on a display board or made out of cardboard. It can be no longer than 100 cm in height, 180 cm in length, and 75 cm deep. It must be able to stand alone. See the display diagram if you need help.
- Information on your display should be easy to read. Typed and printed from a computer would be best.
- Your presentation should take about 3 minutes of speaking time and 3 minutes for judges to ask questions.
- No recording or transmitting devices are permitted (tape recorders, walkie talkies, cell phones, etc.).
- Respect all adults involved in the fair… especially the judges!
- Respect all life forms. Do not perform an experiment that will harm an animal.
- Any project that involves drugs, firearms, or explosives is not permitted.
- Any project that breaks any laws or school rules is not permitted.
- All decisions of the judges and science fair committee are final.
Judging Criteria
Do not be afraid of talking to the judges. Just think of them as fellow scientists that want to hear about what you learned. They are volunteers who care about you. So relax, smile, and have fun! Remember, you are the expert on your project. Here are the things you will need to do and have during your presentation:
PreK through 1st Grade
2nd Grade through 3rd Grade
4th Grade through 8th Grade
PreK through 1st Grade
- A well organized display (worth 2 points)- Be sure to stand to the side of your display so the judges can see it.
- A title (worth 2 points)- You will want to introduce yourself and point out the title of your display and tell the judges why you chose to study your topic.
- A prediction (worth 2 points)- State the problem that you studied (your question) and tell them your prediction (what you thought would happen).
- Background information with at least 1 source (worth 2 points)- Write a paragraph telling us some information on your topic. Tell us what sources you used to find the information. Sources can be books, magazines, websites, and people. You must have at least 1 source.
- Experimental procedures clearly explained (worth 3 points)- Describe all of the steps you took to do your experiment.
- Data that is measurable and includes at least 3 trials (worth 3 points)- You should do your experiment many times (called trials). You should do at least 3 trials. Use charts, tables, graphs, etc. to show the results of each trial.
- Knowledge of your topic (worth 3 points)- You have to sound like you know what you are talking about. Be sure to use science words like problem, procedure, hypothesis, results, and conclusion.
- A conclusion based on your results (worth 3 points)- Tell whether your hypothesis was correct. What did you conclude about your problem? Did you discover another problem to investigate from your experiment?
2nd Grade through 3rd Grade
- A well organized display (worth 2 points)- Be sure to stand to the side of your display so the judges can see it.
- A title, purpose, and reasonable hypothesis (worth 2 points)- You will want to introduce yourself, point out the title of your display, and tell the judges why you chose to study your topic. State the problem that you studied (your question) and tell them your hypothesis (what you thought would happen).
- Background information with at least 3 sources (worth 2 points)- Write a paragraph telling us some information on your topic. Tell us what sources you used to find the information. Sources can be books, magazines, websites, and people. You must have at least 3 sources for top points.
- Experimental procedures clearly explained (worth 3 points)- Describe all of the steps you took to do your experiment.
- Data that is measurable and includes at least 3 trials (worth 3 points)- You should do your experiment many times (called trials). You should do at least 3 trials. Use charts, tables, graphs, etc. to show the results of each trial.
- An analysis of the data (worth 3 points)- Explain what your data means. Were you surprised at the results or did you expect them?
- Knowledge of your topic (worth 4 points)- You have to sound like you know what you are talking about. Be sure to use science words like problem, procedure, hypothesis, results, and conclusion.
- A conclusion based on your results (worth 2 points)- Tell whether your hypothesis was correct. What did you conclude about your problem? Did you discover another problem to investigate from your experiment?
- Real life connections (worth 2 points)- Tell how your experiment can relate to the real world. How can it help people be better, faster, safer, cleaner, etc.?
- Professional attitude and demeanor (worth 2 points)- Be sure to dress nicely, stand up straight, shake hands with the judges, speak clearly, and be polite.
4th Grade through 8th Grade
- A title, purpose, and reasonable hypothesis (worth 2 points)- You will want to introduce yourself, point out the title of your display, and tell the judges why you chose to study your topic. State the problem that you studied (your question) and tell them your hypothesis (what you thought would happen).
- Background information with at least 3 sources (worth 2 points)- Write a paragraph telling us some information on your topic. Tell us what sources you used to find the information. Sources can be books, magazines, websites, and people. You must have at least 3 sources for top points.
- Experimental procedures clearly explained (worth 3 points)- Describe all of the steps you took to do your experiment.
- Variables (worth 3 points)- Point out the controlled variables, independent variable, and dependent variable. These are the things you kept the same, the thing you tested, and the results you checked.
- Data that is measurable and includes at least 3 trials (worth 3 points)- You should do your experiment many times (called trials). You should do at least 3 trials. Use charts, tables, graphs, etc. to show the results of each trial.
- An analysis of the data (worth 3 points)- Explain what your data means. Were you surprised at the results or did you expect them?
- Knowledge of your topic (worth 4 points)- You have to sound like you know what you are talking about. Be sure to use science words like problem, procedure, hypothesis, results, and conclusion.
- A conclusion based on your results (worth 2 points)- Tell whether your hypothesis was correct. What did you conclude about your problem? Did you discover another problem to investigate from your experiment?
- Real life connections (worth 2 points)- Tell how your experiment can relate to the real world. How can it help people be better, faster, safer, cleaner, etc.?
- Professional attitude and demeanor (worth 1 point)- Be sure to dress nicely, stand up straight, shake hands with the judges, speak clearly, and be polite.
Getting Started
There are several types of projects you can do for the science fair. You can make a model to show how something works, like a volcano or the solar system. You can put together a collection, like showing types of dinosaurs or types of butterflies. You can enter these projects into the science fair, however they may not win because you won’t have to design an experiment, form a hypothesis, run trials, record data, and form a conclusion. It would be best to do an experiment.
An experiment is a project that answers a question by running a test and collecting data. Experiment type projects are what the judges will like most. To do an experiment, you use the scientific method.
This is the scientific method:
Step 1: Find a problem. Ask a question.
For example, “I don’t know which paper towels to buy at the store.” That’s a problem. “Which brand of paper towel is the most absorbent?” That’s a question!
Step 2: Research the problem. Find out as much as you can.
For example, “I should find out about these paper towels! To find out about them I can use the Internet, ask other people about paper towels, read magazines about paper towels, or even read books about absorbency.”
Step 3: Make a hypothesis. Predict what might happen based on what you know.
For example, “Wow, a lot of the people I talked to said they like Bounty paper towels the best. Even this article on papertowels.com says Bounty is the most absorbent. I predict that Bounty paper towels will absorb more water than the other brands of paper towels in my experiment.”
Step 4: Conduct the experiment to find out if you were right.
For example, “I’ll put one paper towel from each brand in a different container and pour 2 cups of water into each container. Then, I’ll take all of the towels out and measure how much water is left in each container. This will tell me how much water each paper towel absorbed.”
*Keep a list of the materials you use to put on your display later.
For example: “I used a roll of paper towels from each brand, 3 containers, at least 12 cups of water, measuring cups, and a notebook for recording results.”
*Take note of what things in your experiment are variables. You will need to put them on your display. There are three types of variables in science experiments: constant, independent, and dependent.
Constant variables are the things that you keep the same for each test.
For example, “These are my constant variables: I only used one paper towel per brand. I used the same size container for each paper towel. I used the same amount of water for each paper towel. I left the paper towels in water for the same amount of time.”
Independent variables are the things you change on purpose to see how the results change. You should only change one variable in an experiment.
For example, “I changed the brand of paper towel. The brand of paper towel is my independent variable.”
Dependent variables are what you measure to collect your results. They depend on what you changed in the independent variables.
For example, “I measured how much water was left in each container. The amount of water left in the container depended on what kind of paper towel was in it. The water left in the container is my dependent variable.”
Step 5: Record the data. Do the whole thing at least 3 times to make sure your results aren’t random.
For example, “I’ll write down how much water is left in each container. Then I’ll make a table with the name of each brand, how much water was left in each container, and how much water each towel absorbed. Then I’ll do it two more times to make sure the same brand is the most absorbent every time. If a different brand wins every time, I still won’t know which paper towel is better.”
Step 6: Form a conclusion. Check your hypothesis with the results. Were you right?
For example, “Every time I tested the paper towels, I found that this new brand of paper towels, Super Towels, was the most absorbent. That surprises me because I thought Bounty would have been more absorbent. Neat!”
Step 7: Write about what you learned and how it applies to the real world. Maybe come up with another problem.
For example, “Super Towel brand paper towels absorb more water than the other brands of paper towels. People can use this information. Now they can buy Super Towel paper towels and use fewer towels when they clean up messes. This will save people money and help save trees! But I don’t know how much Super Towels cost. Which towels are both cheap AND absorbent? That’s a question I could investigate next time.”
An experiment is a project that answers a question by running a test and collecting data. Experiment type projects are what the judges will like most. To do an experiment, you use the scientific method.
This is the scientific method:
Step 1: Find a problem. Ask a question.
For example, “I don’t know which paper towels to buy at the store.” That’s a problem. “Which brand of paper towel is the most absorbent?” That’s a question!
Step 2: Research the problem. Find out as much as you can.
For example, “I should find out about these paper towels! To find out about them I can use the Internet, ask other people about paper towels, read magazines about paper towels, or even read books about absorbency.”
Step 3: Make a hypothesis. Predict what might happen based on what you know.
For example, “Wow, a lot of the people I talked to said they like Bounty paper towels the best. Even this article on papertowels.com says Bounty is the most absorbent. I predict that Bounty paper towels will absorb more water than the other brands of paper towels in my experiment.”
Step 4: Conduct the experiment to find out if you were right.
For example, “I’ll put one paper towel from each brand in a different container and pour 2 cups of water into each container. Then, I’ll take all of the towels out and measure how much water is left in each container. This will tell me how much water each paper towel absorbed.”
*Keep a list of the materials you use to put on your display later.
For example: “I used a roll of paper towels from each brand, 3 containers, at least 12 cups of water, measuring cups, and a notebook for recording results.”
*Take note of what things in your experiment are variables. You will need to put them on your display. There are three types of variables in science experiments: constant, independent, and dependent.
Constant variables are the things that you keep the same for each test.
For example, “These are my constant variables: I only used one paper towel per brand. I used the same size container for each paper towel. I used the same amount of water for each paper towel. I left the paper towels in water for the same amount of time.”
Independent variables are the things you change on purpose to see how the results change. You should only change one variable in an experiment.
For example, “I changed the brand of paper towel. The brand of paper towel is my independent variable.”
Dependent variables are what you measure to collect your results. They depend on what you changed in the independent variables.
For example, “I measured how much water was left in each container. The amount of water left in the container depended on what kind of paper towel was in it. The water left in the container is my dependent variable.”
Step 5: Record the data. Do the whole thing at least 3 times to make sure your results aren’t random.
For example, “I’ll write down how much water is left in each container. Then I’ll make a table with the name of each brand, how much water was left in each container, and how much water each towel absorbed. Then I’ll do it two more times to make sure the same brand is the most absorbent every time. If a different brand wins every time, I still won’t know which paper towel is better.”
Step 6: Form a conclusion. Check your hypothesis with the results. Were you right?
For example, “Every time I tested the paper towels, I found that this new brand of paper towels, Super Towels, was the most absorbent. That surprises me because I thought Bounty would have been more absorbent. Neat!”
Step 7: Write about what you learned and how it applies to the real world. Maybe come up with another problem.
For example, “Super Towel brand paper towels absorb more water than the other brands of paper towels. People can use this information. Now they can buy Super Towel paper towels and use fewer towels when they clean up messes. This will save people money and help save trees! But I don’t know how much Super Towels cost. Which towels are both cheap AND absorbent? That’s a question I could investigate next time.”
Display Diagram
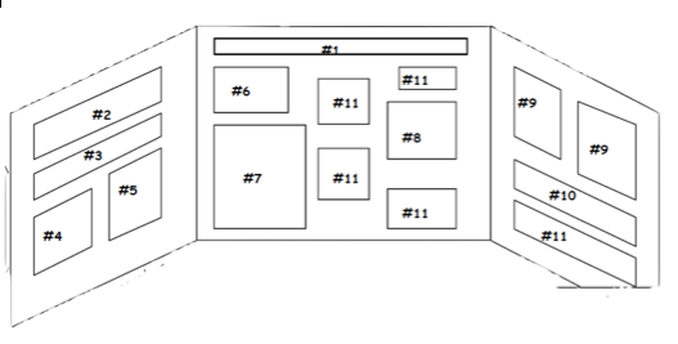
Here is an example of a display. If you aren’t sure where to put the information, you can use these suggestions. Your display does not have to look this way. You are in charge of your display and its design.
- Title- This is where you should put the name of your experiment. The question you are answering is a good title.
- Purpose- This is where you put what you want to find out. Tell us why you did the experiment.
- Hypothesis- What was your prediction for the results?
- Background Information- Tell us the important information you learned about your topic from the sources you used.
- Sources- List the books, magazines, and websites you used. You should also list the people you interviewed, if you interviewed anyone about your topic.
- Materials- List the materials you used to perform the experiment. This is important for others that may want to try your experiment.
- Procedures- Describe the steps or directions for completing your experiment.
- Variables- Tell us what things you changed, what things you kept the same, and what things you measured during the experiment.
- Results- Use charts, graphs, tables, etc. to show the results of each trial of your experiment.
- Conclusion- Tell what happened. Did it work? Were you right about the hypothesis? What did you learn?
- Application- Explain how your experiment relates to the real world.
- Pictures- Take pictures during your experiment. Put them on your display to help the judges understand what you did and what happened.
Use a computer to type everything. If you can’t do that, be sure to use your very best handwriting. It must be easy to read.
Don’t go crazy with the glue. Try using a glue stick or spray on adhesive.
Be creative yet tidy. You can make borders with colored paper or even stick objects to your display, but make sure the display can stand on its own. Please do not stick food or plants to the board. They can become smelly, or someone may be allergic.
Still Need Help?
Helpful Resources
There are many books and websites available to help students choose science fair projects. You can look in a science textbook at school. You can ask Mrs. Keck to suggest a science book with ideas. You can look in the Okmulgee Public Library for a book about science fair projects. You can look online for ideas.
Need more?
For additional help choosing a topic, writing a question, designing an experiment, collecting data, choosing variables, or anything else, please talk to Mrs. Keck. Mrs. Keck is at school to help with all of your science fair needs! Parents are welcome to stop by or send an email for help with projects as well.
For questions or concerns, please contact Mrs. Keck.
akeck@sbridgeacademy.org
(903) 651-1608
There are many books and websites available to help students choose science fair projects. You can look in a science textbook at school. You can ask Mrs. Keck to suggest a science book with ideas. You can look in the Okmulgee Public Library for a book about science fair projects. You can look online for ideas.
Need more?
For additional help choosing a topic, writing a question, designing an experiment, collecting data, choosing variables, or anything else, please talk to Mrs. Keck. Mrs. Keck is at school to help with all of your science fair needs! Parents are welcome to stop by or send an email for help with projects as well.
For questions or concerns, please contact Mrs. Keck.
akeck@sbridgeacademy.org
(903) 651-1608
